A°/ Indicateur GDOP et précision UERE Le principe de positionnement Navstar étant une triangulation, deux facteurs interviennent directement dans l'erreur sur la position finale :
Pour que la mesure soit précise, il faut une bonne répartition des satellites dans le ciel. Si ceux-ci sont rapprochés (en apparence), les pseudos distances seront très proches, et la mesure finale sera peu précise. Si au contraire, les satellites sont bien répartis, les pseudos distances seront bien différentes et la mesure sera précise. L'animation ci-dessous montre les trajectoires simulées des satellites «visibles»
au-dessus de la tête d'un observateur, pour un cycle d'une durée de 24 heures
(les satellites font deux fois le tour de la Terre en 24 heures).
Les nombres affichés sur la droite de la figure fournissent les résultats des calculs de position, tels qu'ils pourraient avoir été calculés (en temps réel) par le récepteur GPS à partir des données reçues des satellites:
Si l'on observe avec attention les valeurs numériques calculées de GDOP, on s'aperçoit qu'elles sont la plupart du temps relativement petites, au voisinage de 1,6. Ceci se produit lorsque les différents satellites visibles dans le ciel sont «bien» distribués les uns par rapport aux autres (c'est-à-dire: leur répartition dans le ciel est homogène). En revanche, il arrive quelquefois que les satellites soient «mal placés» les uns par rapport aux autres, ce qui entraîne des imprécisions importantes dans la détermination de la position de l'observateur. Ceci se produit par exemple lorsque plusieurs satellites sont en apparence très proches l'un de l'autre dans le ciel. Pour illustrer cette question, regardons par exemple les trois figures suivantes, qui montrent les positions respectives instantanées des satellites No 5, 6, 9, 13, 16, 20, et 24 visibles entre 19h18 et 19h30:
En observant ces figures avec attention, on peut
remarquer qu'à 19h30 les satellites No 5 et 16 se trouvent pratiquement à la même
position, idem pour les satellites 13 et 24, ainsi que 9 et 20. Dans cette
situation, le récepteur GPS réagit comme s'il ne voyait que 3 satellites à ce
moment-là, ce qui est insuffisant pour fournir la position avec une bonne précision.
Comme on peut le voir, l'indicateur GDOP fournit une mesure de la «qualité»
de la répartition mutuelle des satellites dans le ciel. Si GDOP est petit, la répartition
est bonne, si GDOP est grand, cela signifie que la répartition géométrique
des satellites est mauvaise et que la précision ne peut pas être assurée.
La précision finale de localisation peut
s'exprimer comme le produit de l'erreur de distance équivalente et du facteur
représentatif de la qualité de la géométrie satellites / utilisateur : L'erreur U.E.R.E comprend la stabilité des horloges utilisateur et émetteur, la précision de la résolution des équations, les variations de vitesse des ondes dues à la traversée des différentes couches de l'atmosphère (on peut prévoir ces variation approximativement), la précision de la position des satellites. Cette erreur totale est d'environ 18 nanosecondes, soit 6 mètres. Une valeur moyenne du G.D.O.P de 4 donne une erreur approximative sur la position finale de 24 mètres. B°/ Le DGPS ou GPS Différentiel 1 L'appellation DGPS couvre un ensemble de
techniques destinées à améliorer la précision de base du système GPS.
Toutes ces techniques sont basées sur le même principe (le "différentiel")
mais diffèrent par les moyens de mise en uvre ainsi que par la nature même
des informations auxquelles ce principe est appliqué.
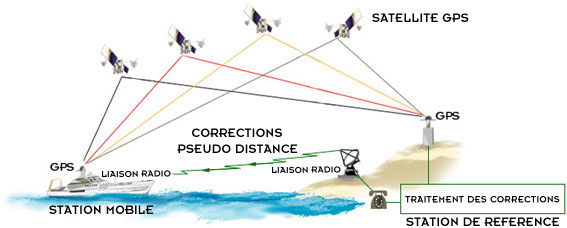
L'idée fondamentale du DGPS est que deux (ou plus) récepteurs observant les mêmes satellites feront des erreurs de mesure d'autant plus semblables que ces récepteurs seront proches. En plaçant un récepteur dit de référence sur une position parfaitement connue, il est possible d'évaluer non pas cette position à partir des mesures qu'il effectue, mais la valeur théorique que devraient avoir ces mesures à partir de la position connue, et de les comparer ensuite avec les mesures réelles. La différence de ces valeurs donne l'erreur de mesure. Cette erreur mesurée sur le récepteur de référence peut ensuite servir à corriger les erreurs de mesure des récepteurs placés sur des positions inconnues. Ce principe n'est valide que pour des mesures simultanées ou quasi-simultanées, et son efficacité décroît avec l'asynchronisme des mesures. Il y a donc deux facteurs limitatifs de la qualité du DGPS : la décorellation spatiale des erreurs, et leur décorellation temporelle. Néanmoins, sous sa forme la plus simple, le DGPS permet de ramener la précision GPS de trente à quelques mètres, et sous ses formes les plus sophistiquées à quelques millimètres. Les récepteurs DGPS sont des récepteurs capables de lire à la fois les signaux venant des satellites et les signaux venant de stations de référence DGPS devant être situées dans les 100 à 1000 km à la ronde (plus la station est proche, plus le DGPS sera précis) C°/ Protection et intégrité du système
L'altitude des satellites de 20200 Km est une
distance qui demande des ressources considérables pour en destruir ne serait-ce
qu'un seul. De plus l'espacement entre les satellites est optimisé pour éviter
une destruction multiple.
Le signal de recalage et d'entretien des
satellites Navstar émis par la station de contrôle est chiffré.
On définit l'intégrité d'un système comme sa
capacité à prévenir l'utilisateur en temps opportun lorsque le système ne
doit pas être utilisé parce que ses performances sont trop dégradées.
|